Hey, I'm
Nomad Robotics Engineer looking for opportunities.
I build intelligent machines that see, think, and move.

Newspace Research and Technologies
Systems Engineer
- Enhanced feature integration testing by incorporating Hardware-in-the-Loop (HITL) testing alongside SITL, bench, and flight testing.
- Diagnosed, resolved, and optimized issues across complex cyber-physical swarming aerial robotic systems.
2024-Present

DEVCOM Army Research Laboratory
Journeyman Fellow
- Designed and deployed a ROS-based simulation environment to test and evaluate novel quality metrics for multi-agent mapping.
- Supported the development and testing of distributed information-gathering methods using autonomous ground vehicles.
2022-2023

Skye Air Mobility
Systems Analyst & GCS Operator
- Validated a medical UAV delivery system through 80+ hours of flight testing, ensuring reliable transport of 4.5 lbs payloads across 6 miles.
- Enabled regulatory approval for BVLOS operations by leading cross-functional experiments with Civil Aviation Authorities.
- Spearheaded the development of a CONOPS framework, securing flight readiness and regulatory compliance for 100+ hours of BVLOS missions.
2020-2021

Curl Tech
Intelligent Systems Engineer
- Engineered three prototype UAVs for automated multispectral and LiDAR-based surveying missions.
- Pioneered UAV solutions for early detection of spontaneous coal combustion using advanced computer vision techniques.
- Led system integration of flight controllers and sensors (LiDAR, cameras, altimeters, GPS) with onboard computers using ROS for full-flight autonomy.
2019-2020
Curl Tech
Data Scientist
- Developed and implemented computer vision algorithms to analyze railway track conditions using autonomous UAVs, resulting in a 50% reduction in maintenance time.
- Developed and implemented a cutting-edge LIDAR-based 3D mapping solution on UAVs, enabling the state government to efficient survey rural roads with an accuracy of over 90%, surpassing industry standards.
2018-2019
Projects
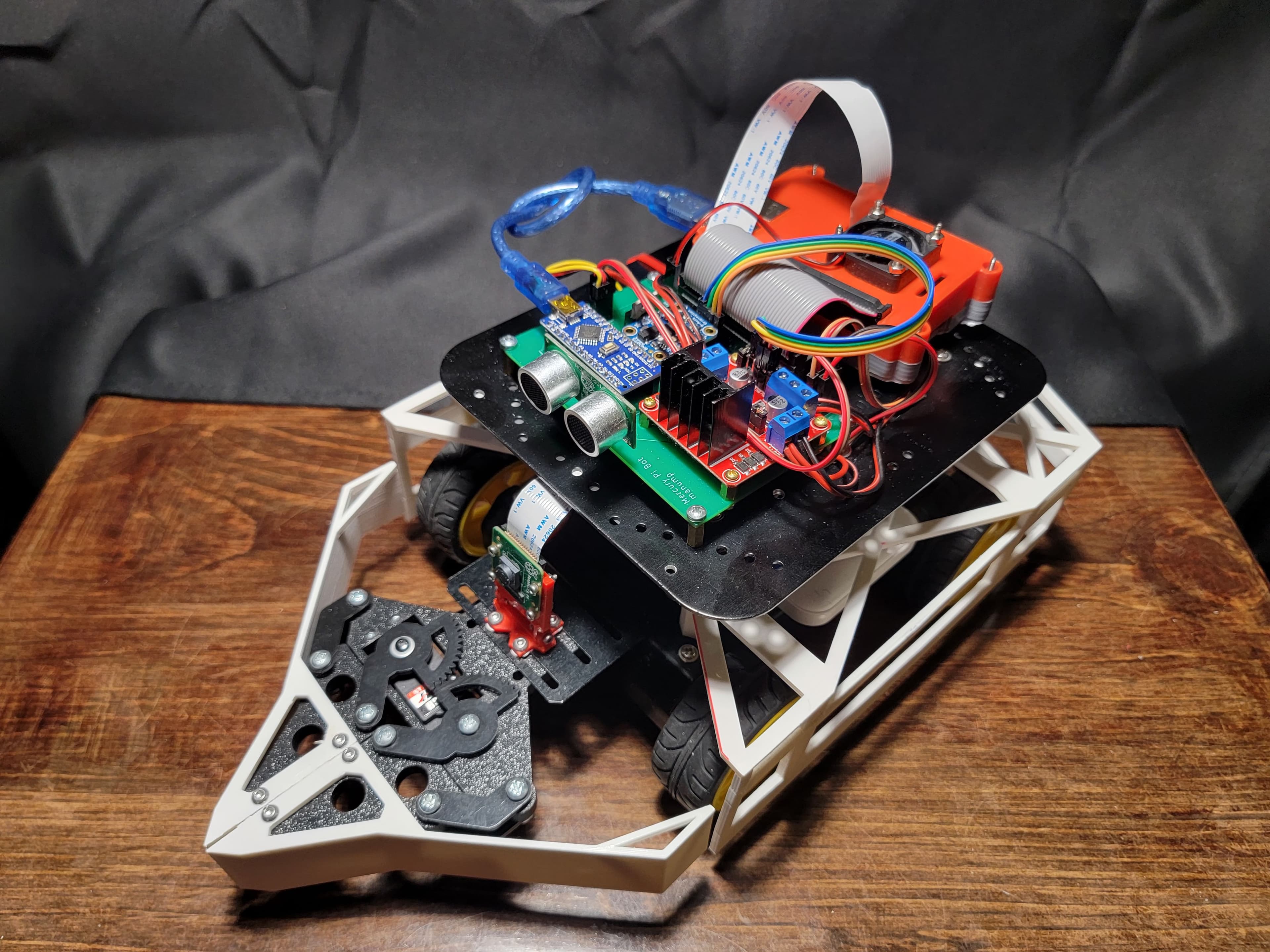
Pick and Place Robot
Academic Research
- Multi-Agent Mapping
- SLAM Implementation
ROSPythonComputer Vision










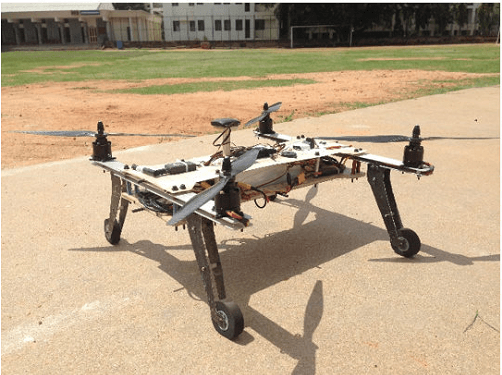
Multipurpose UAV Robot
Academic Research
- Multi-Agent Mapping
- SLAM Implementation
C++OpenCVDeep Learningheads
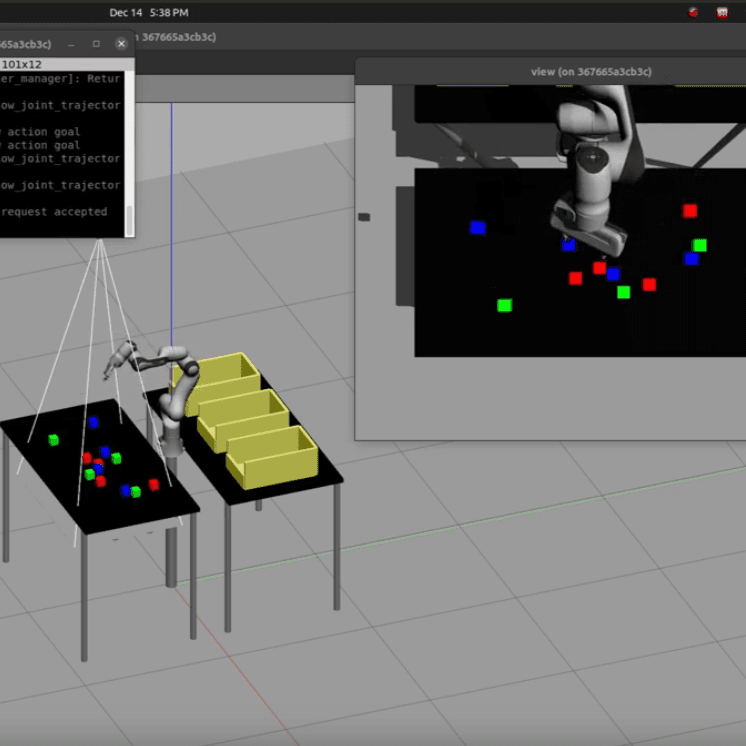
Autonomous Kitting Robot
Autonomous Systems
- Railway Track Inspection
- 3D Mapping System
C++OpenCVDeep Learning


Autonomous Delivery Robot
Academic Research
- Multi-Agent Mapping
- SLAM Implementation
C++OpenCVDeep Learning


Skills
Programming Languages
PythonC++MatlabBash
Embedded Systems
Jetson TX2Jetson AGXJetson NanoRaspberry PiArduinoPixhawkESP32
Libraries and Tools
ROSROS2OpenCVPytorchTensorflowGitMoveIt!ArdupilotPX4SolidworksCameo Systems ModelerGazebo
Blog
Unable to load blog posts at the moment. Please check back later.